Ongoing Research Projects
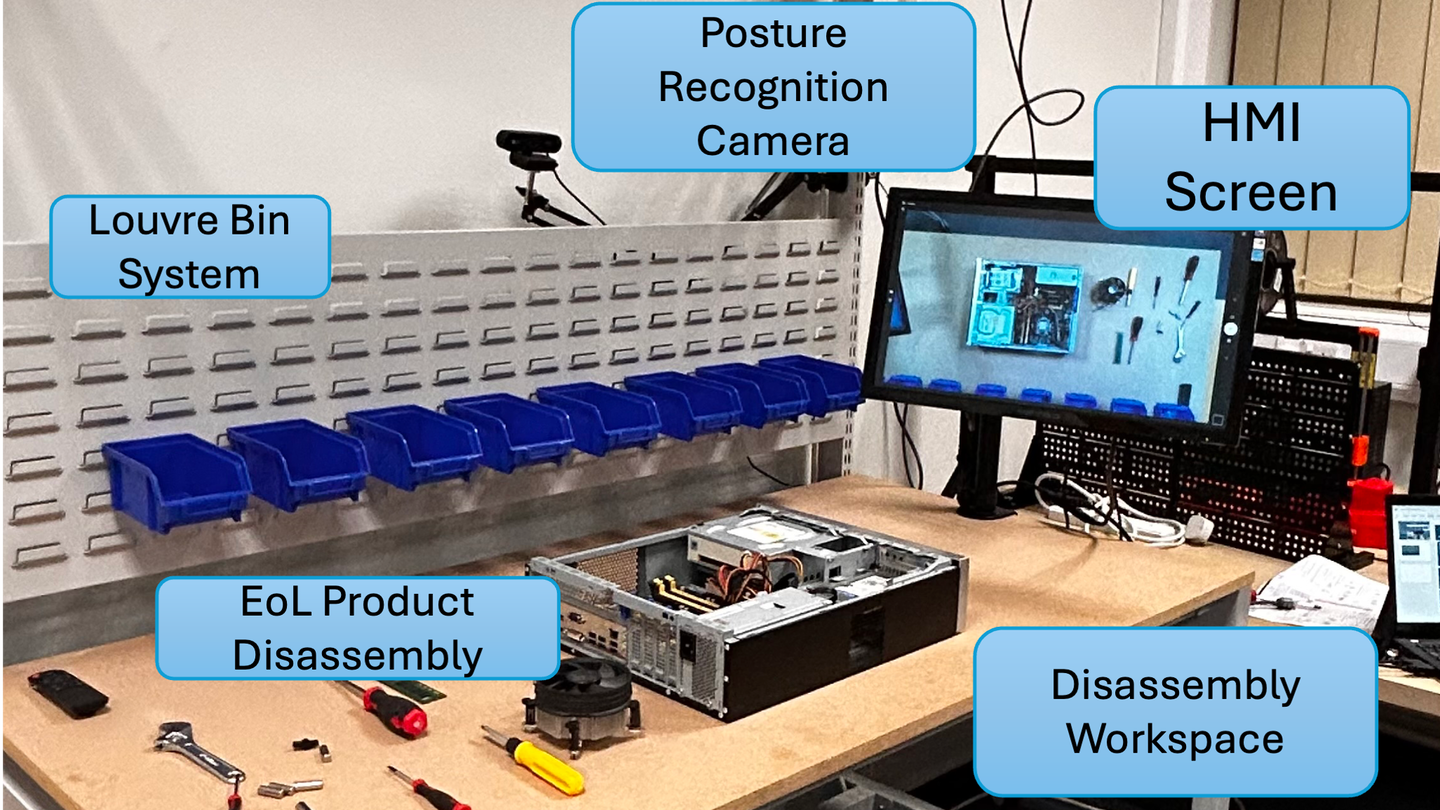
Human-Centric Spatial Augmented Reality for Interactive (Dis)assembly Operator Assistance
Developing a computer vision-enabled Spatial Augmented Reality framework for intelligent, privacy-preserving operator assistance in human-centric smart (dis)assembly.
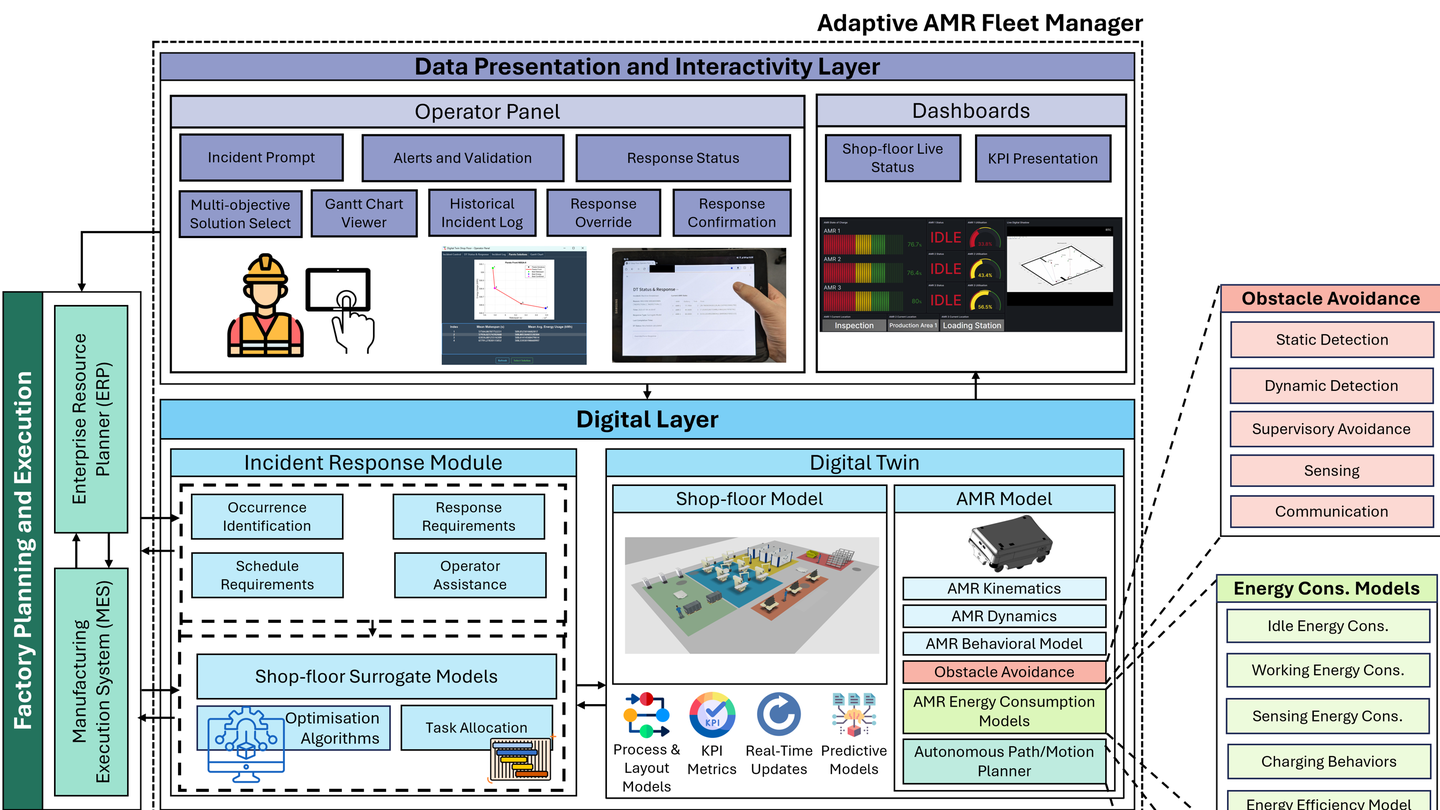
Human-in-the-Loop Digital Twin for Resilient AMR Fleet Management
Building a policy-oriented, human-in-the-loop Digital Twin for incident-aware AMR fleet management, combining OPC-UA event monitoring, time-bounded surrogate optimisation, and high-fidelity simulation for governed, resilient intralogistics.
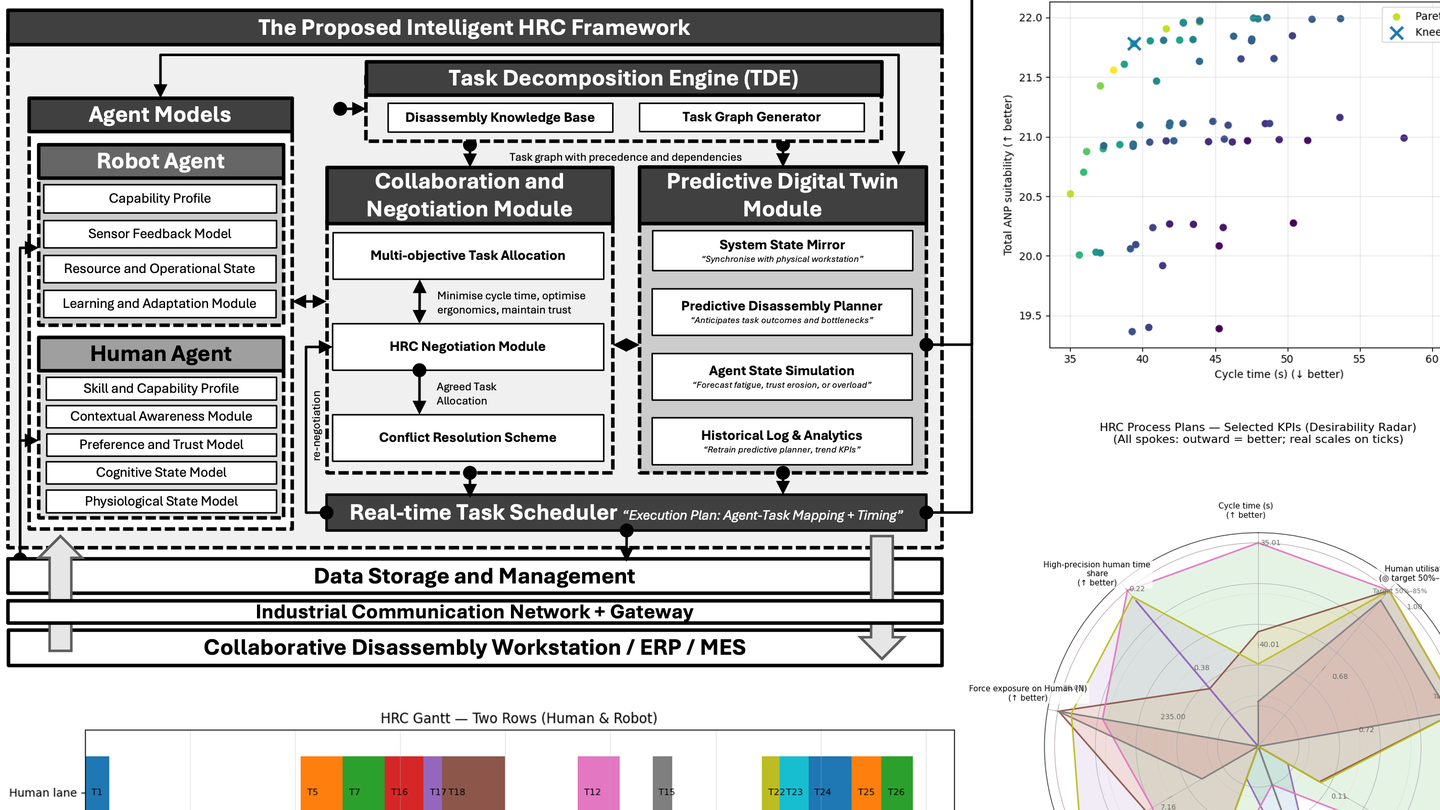
Human-State Aware Human-Robot Collaborative Disassembly
Developing a human-centric HRC framework for high-value end-of-life (EoL) disassembly that adapts task allocation and robot behaviour to real-time operator state, combining cognitive and physiological modelling, negotiation-based collaboration, and a predictive digital twin to improve safety, ergonomics, and execution reliability.
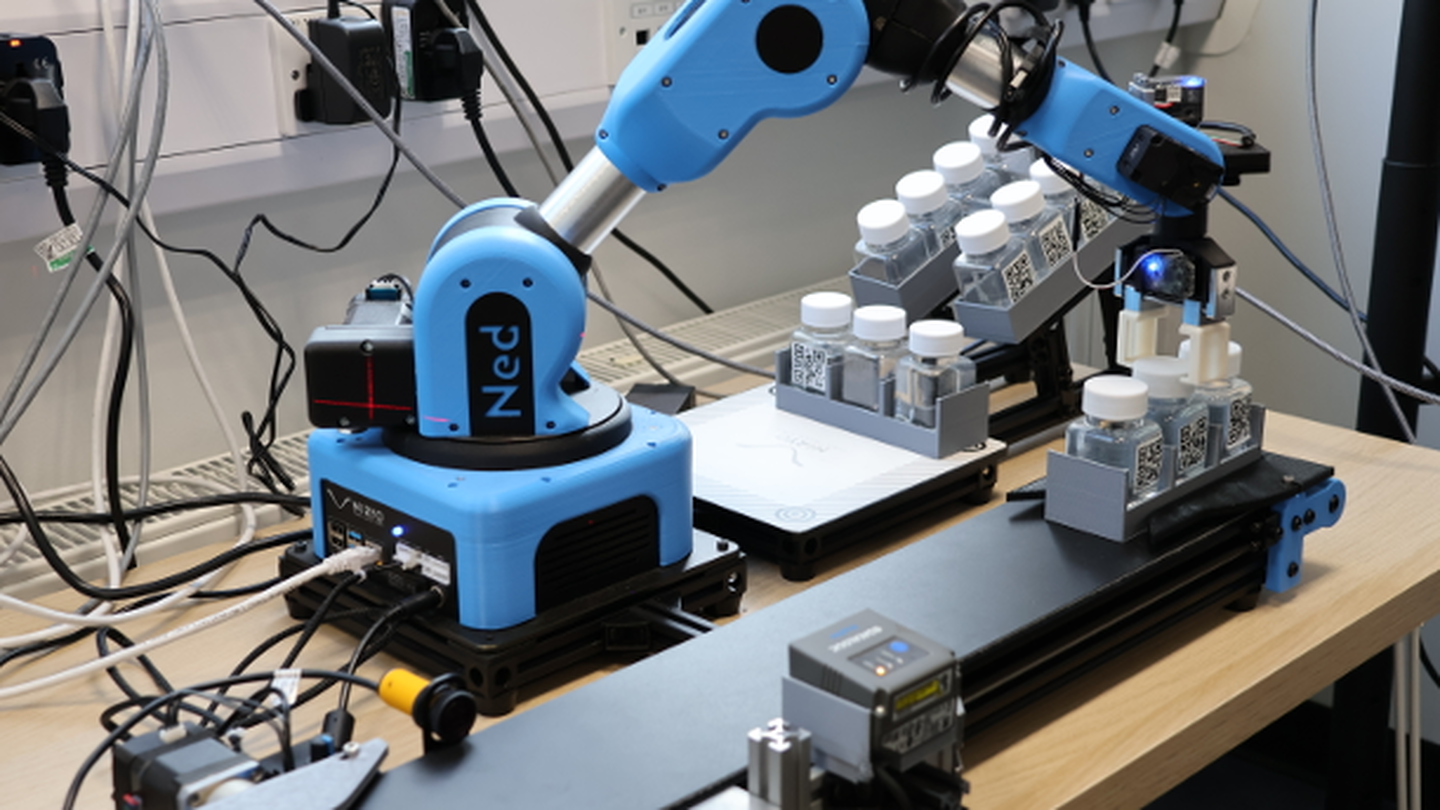
Safety-Aware Anomaly Detection and RUL Analytics for Industrial Machinery
Developing an auditable, safety-aware anomaly detection and Remaining Useful Life (RUL) analytics pipeline for industrial machinery, validated on our bottle inspection and sorting demonstrator, combining multi-sensor time-series learning, uncertainty-aware alarms, and human-in-the-loop verification.